
规格介绍

| 特性参数 | 规格说明 |
|---|---|
| 工作频率 | 40kHz±1kHz |
| 测量周期 | ≥60ms |
| 测量角度 | ≤15°锥角 |
| 工作温度范围 | -15℃~70℃ |
| 模块尺寸 | 45mm×20mm×15mm |
| 模块重量 | 约9g |
简单介绍
HC-SR04超声波
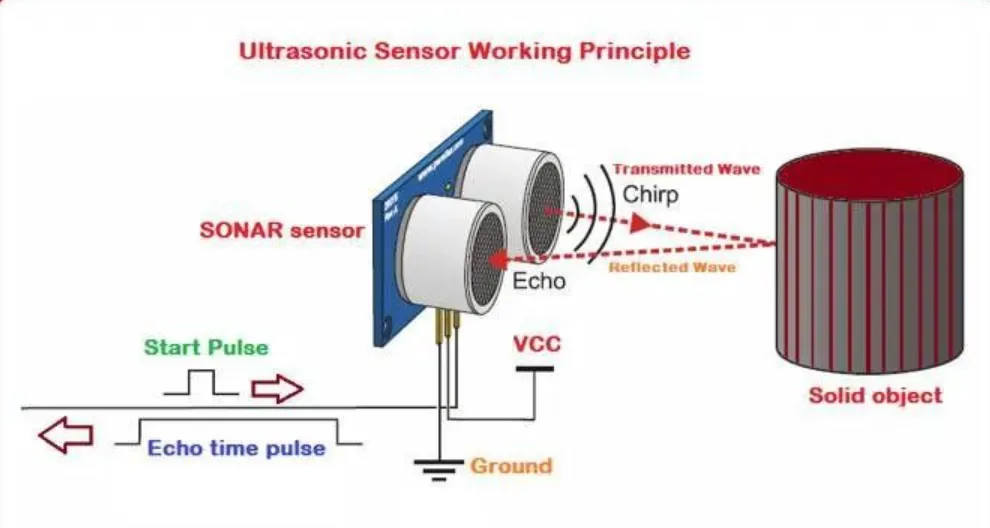
发射换能器(T):电信号转换成 40kHz 超声波声波;
接收换能器(R):反射回来的声波转回微弱电信号;
发射驱动电路:放大 MCU 给的触发脉冲,驱动振子发出 8 串 40kHz 方波;
接收放大整形电路:微弱回波信号放大、滤波、比较,输出标准高电平 Echo 信号。
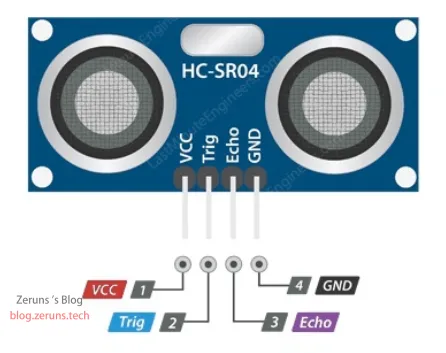
引脚:VCC (5V)、Trig (触发输入)、Echo (测距输出)、GND。
| 引脚名称 | 类型 | 功能描述 | 连接注意事项 |
|---|---|---|---|
| VCC | 电源 | 5V直流供电 | 需并联100nF滤波电容 |
| Trig | 输入 | 触发信号输入 | 需≥10μs高电平 |
| Echo | 输出 | 回波信号输出(5V TTL) | 建议分压后接入STM32(3.3V电平兼容) |
| GND | 地线 | 电源参考地 | 确保与控制器共地 |

网上流传的原理图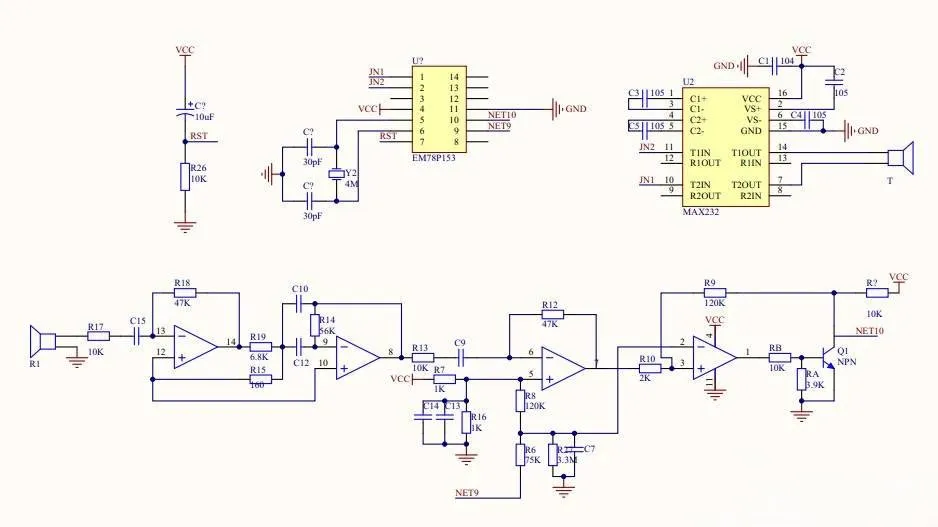
市面上产品的原理图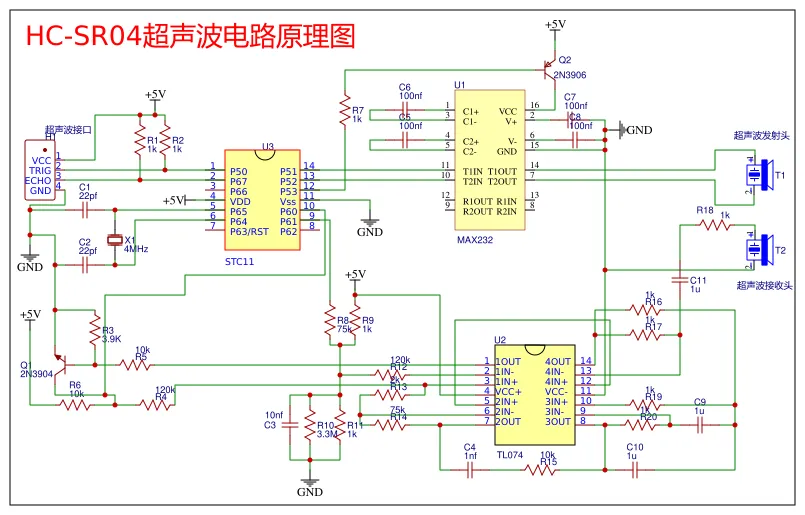
如何读取
我们先通过TRIG输入一个波
波要10us
然后芯片内部会循环返回40k的波
然后通过模块上的电路进行放大
接收信号经过放大、滤波和整形后,从 ECHO 引脚输出一个高电平信号,其持续时间与超声波的传播时间成正比。
声速公式:v = 331.4 + 0.6T(T 为环境温度,单位℃)。
例如,20℃时声速约为 343.4m/s,对应距离公式:d = t × 343.4 × 100 ÷ 2 ÷ 10^6 = t × 0.01717
(单位:cm)。
温度影响:温度每变化 1℃,声速变化约 0.6m/s,测距精度误差约 0.17%,高精度场景需接入温湿度传感器(如 DHT11)进行补偿。
